Innovative system for robot visual guidance for fixed and mobile scene management
RGAV - Contract: 213CI/2018, Code: PN-III-P2-2.1-CI-2018-1266
Identification data
Contract NO. 213CI/2018
Financing: state budget
PN III Program name: Programme 2 - Rising the competitivity of Romanian economy by research, development and innovation
Subprogram name: Subprogramme 2.1 - Competitivity through research, development and innovation - Innovation cheques
Project type: Innovation cheques
Project title: Innovative system for robot visual guidance for fixed and mobile scene management
About the project
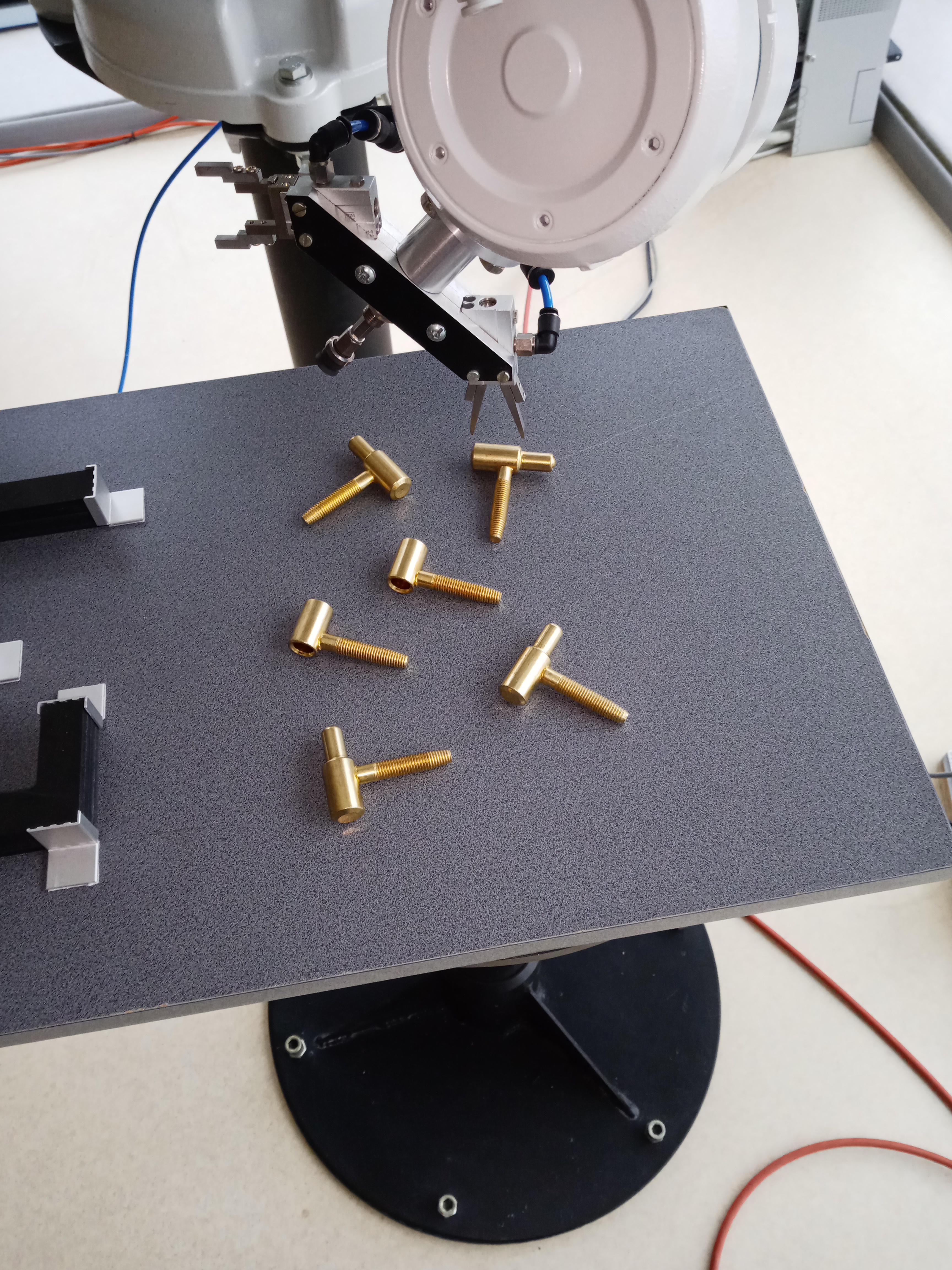
The project concerns the development, testing and validation for industrial realization of a industrial robot visual guidance solution for processing objects in fixed and mobile scenes (static and mobile objects on conveyor belts). The robot-vision (AV) system will recongize and localize in real time classes of obects, which will be handeld by the robot. The solution is based on the integration of existing AV systems (Adept and Cognex) with industrial robots produced by Adept (Omron) and ABB for developing object handling services through visual guidance of robots: A) handling objects in fixed scenes, where the objects are presented to the robot-vision system in random, fixed positions; B) handling objects in mobile scenes in which the objects are recognized, localized and grasped by the robot-vision system „on the fly”, in conditions where there is no encoder on the conveyor belt, the computation of the position being executed exclusive on the VA system which uses automated visual guidance (AVG) and Visual Servoing techniques and is able to compute with precision the position of the object on the conveyor belt for robotized handling. The solution will be implemented on a robot-AV system composed by: an AV system based on AdeptSight and a SCARA Adept Cobra s600 robon, and an AV system from Cognex, Cognex In-Sight and and ABB IRB 140 robot.
The project objective
The main objective of the project is to develop a ready to use solution for industrial robots visual guidance in order to process objects in fixed and mobile scenes.
Deliverables
- Hardware/software system architecture
- The technical solution (describing the Look and Move and Visual Servoing techniques used in the project)
- Software packages for ABB robots (implementing the solution)
- Software packages for Omron-Adept robots (implementing the solution)
- Software packages for Adept AV system (implementing the solution)
- Software packages for Cognex AV system (implementing the solution)
- Presentations for training
- Implementation manual
- Operating manual
Results
- Software packages for ABB robots (implementing the solution)
- Software packages for Omron-Adept robots (implementing the solution)
- Software packages for Adept AV system (implementing the solution)
- Software packages for Cognex AV system (implementing the solution)



Research infrastructure