Sistem inovativ pentru ghidarea vizuala a robotilor in vederea managementului scenelor fixe si in miscare
RGAV - Contract: 213CI/2018, Cod: PN-III-P2-2.1-CI-2018-1266
Date de identificare
Contract NR. 213CI/2018
Finanțare: bugetul de stat
Denumirea Programului din PN III: Programul 2 - Cresterea competitivitatii economiei
romanesti prin cercetare, dezvoltare si inovare
Denumirea Subprogramului: Subprogram 2.1 - Competitivitate prin cercetare,
dezvoltare si inovare - Cecuri de inovare
Tip proiect: Cecuri de inovare
Titlul proiectului: Sistem inovativ pentru ghidarea vizuala a robotilor in
vederea managementului scenelor fixe si in miscare
Despre Proiect
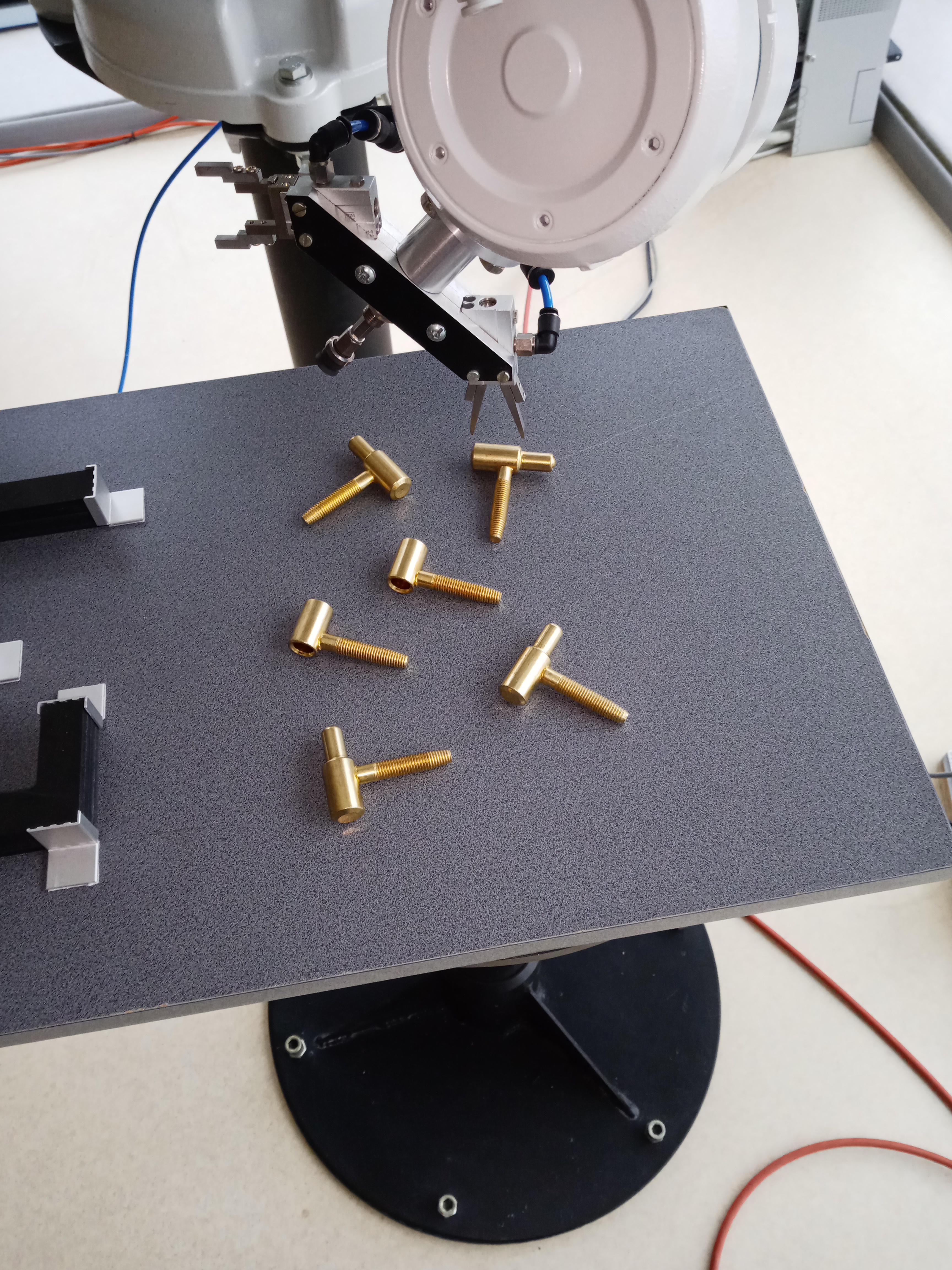
Proiectul vizeaza elaborarea, testarea si validarea in vederea introducerii in fabricatie a unei solutii de ghidare vizuala a robotilor industriali pentru procesarea obiectelor in scene fixe si mobile (obiecte statice si mobile transportate de benzi conveior). Sistemul robot-vedere artificiala (VA) va recunoaste si localiza in timp real clase de obiecte, care apoi vor putea fi manipulate de catre robot. Solutia se bazeaza pe integrarea solutiilor de vedere artificiala existente (Adept si Cognex) cu roboti industriali produsi de firma Adept (Omron) si ABB in vederea dezvoltarii de servicii de procesare a obiectelor prin ghidare vizuala a robotilor: A) procesare a obiectelor in scene fixe, in care obiectele sunt prezentate sistemului robot-vedere artificiala, in pozitii aleatoare, fixe; B) procesarea obiectelor in scene mobile in care obiectele sunt recunoscute, localizate si preluate de catre sistemul robot vedere din miscare („on the fly”), in conditiile in care nu exista un encoder pe conveyor, calculul pozitiei fiind realizat exclusiv pe baza sistemului de VA care folosind tehnici de ghidare vizuala automata (GVA) si tehnici de Visual Servoing este capabil sa calculeze cu precizie pozitia obiectului pe banda conveior in vederea manipularii robotizate. Solutia va fi implementata pe un sistem robot - VA, compus din: sistem de VA AdeptSight si robot SCARA Adept Cobra s600, si un sistem de VA Cognex In-Sight si robot ABB IRB 140.
Obiectivul proiectului
Obiectivul principal al proiectului este acela de a dezvolta o solutie la cheie pentru ghidarea vizuala a robotilor industriali in vederea procesarii obiectelor in scene fixe si mobile.
Livrabile
- Arhitectura sistemului hardware/software
- Descrierea solutiei tehnice (descrierea tehnicilor de tip Look and Move si Visual Servoing utilizate in proiect)
- Pachete de programe pentru robotii ABB (pentru implementarea solutiei)
- Pachete de programe pentru robotii Omron-Adept (pentru implementarea solutiei)
- Pachete de programe pentru sistemul de VA Adept (pentru implementarea solutiei)
- Pachete de programe pentru sistemul de VA Cognex (pentru implementarea solutiei)
- Prezentari pentru instruire
- Manual de implementare
- Manual de utilizare
Rezultate obtinute
- Pachete de programe pentru robotii ABB (pentru implementarea solutiei)
- Pachete de programe pentru robotii Omron-Adept (pentru implementarea solutiei)
- Pachete de programe pentru sistemul de VA Adept (pentru implementarea solutiei)
- Pachete de programe pentru sistemul de VA Cognex (pentru implementarea solutiei)



Infrastructura de cercetare